BL90/35 Robotic Joint Drive
Compact robotic joint drive |
||
|
Integrared Motor Controler |
Compact design Surface mounted permanent magnets |
Fully integrated |


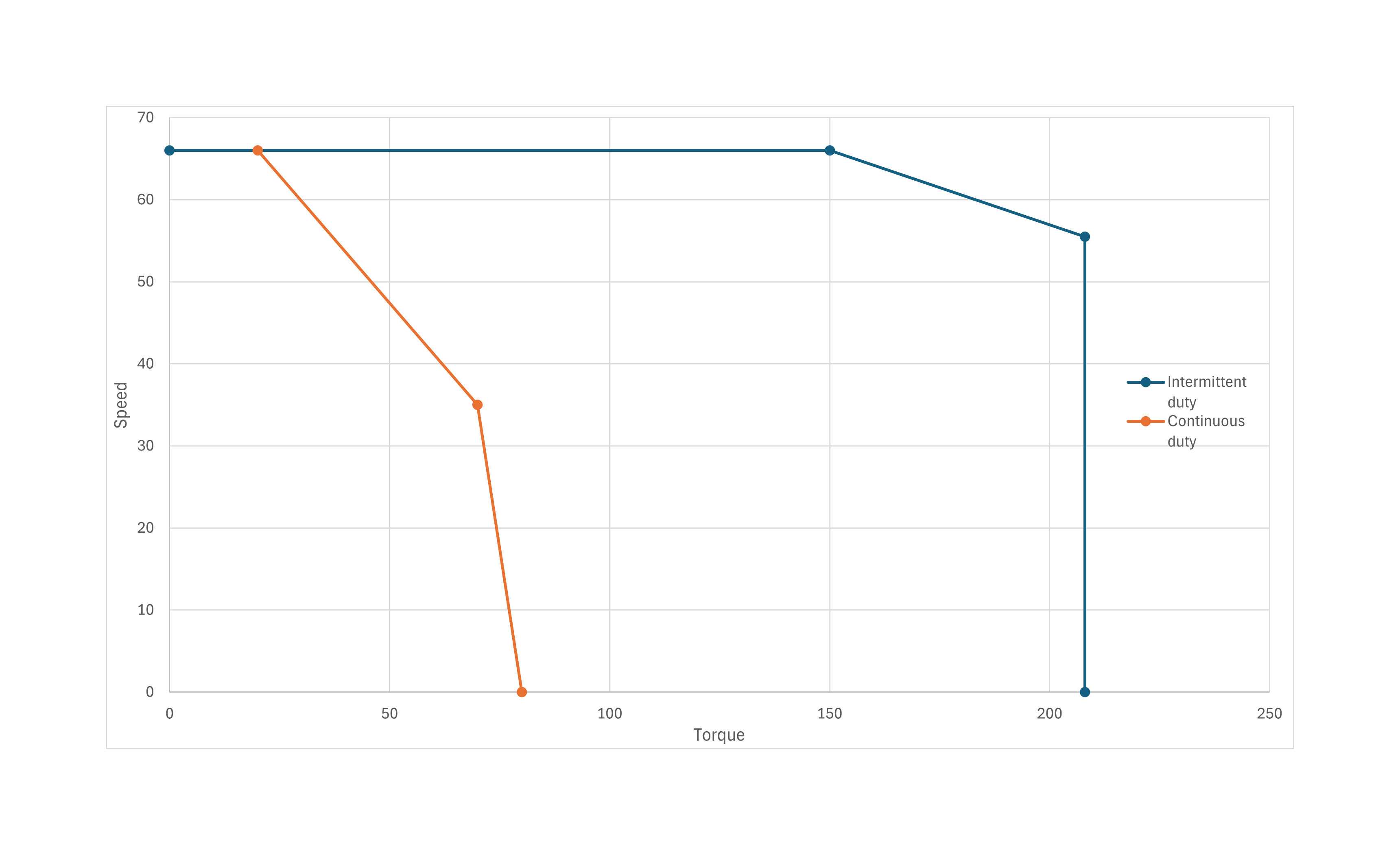
TECHNICAL DATA
|
Nominal DC voltage [V] |
48 |
Nominal torque [Nm] |
70
|
No load speed [RPM] |
TBD |
| Motor working temperature range [°C] Motor winding max temperature [°C] Motor ambient temperature range [°C] Motor cooling (medium, temp) |
TBD 130 TBD air |
Weight [kg] Rotor inertia [E-5 kg-mm2] Protection clas Gearbox ratio Wheel load [kg] Connection geometry |
TBD TBD IP65 100 (or 50,160) n/a .... |
Brake nominal voltage [V] Brake resistance [Ohm] Brake holding torque [Nm] Temperature sensor type Encoder sensor operation voltage Encoder sensor type |
24 n/a 140 n/a n/a n/a n/a |
|
Communication Communication protocol |
CAN Open |
Electrical connection type Communication connector type |
PLe Cat3 (acc. to EN 13849-1) or SIL3 (acc. to EN 61508) STO, SBC only with EtherCAT: STO, SBC, SS1, SS2, SOS, SLS, FSoE |
||
|
Other notes |
Performance charts represent simulation results - short therm operation |
||||













